从底盘到家庭机器人能力的完整路线
01 · 项目定位
从智能小车走向家庭机器人
PiCarHome 是前期小车技术路线的系统化升级:不只验证“能动起来”,而是把底盘、感知、定位、规划、导航、交互与家庭看护应用组织成一台可长期迭代的机器人平台。
PiCar Mini 2WD超低成本教学小车,完成 ESP32、MicroPython 与基础 I/O 入门。
MiniClaw高性能运动底盘实验,验证轮毂电机、LIN 通信与里程反馈。
PiCarHome家庭机器人平台,集成 Pi5、ROS2、雷达、IMU、SLAM、Nav2 与 Web。
它适合承载本科课程、研究生课题、具身智能原型、家庭看护应用和机器人系统工程实践。
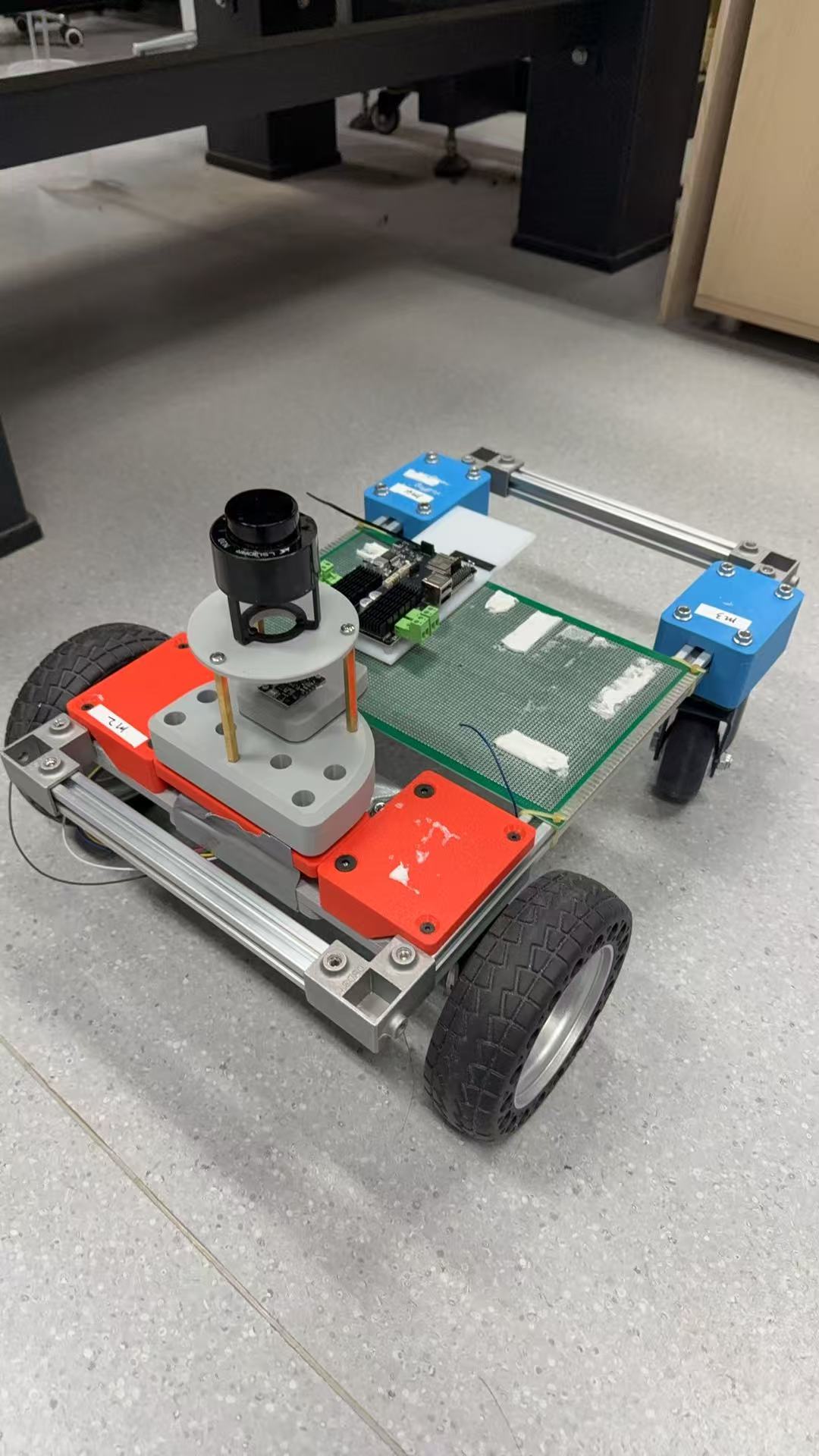
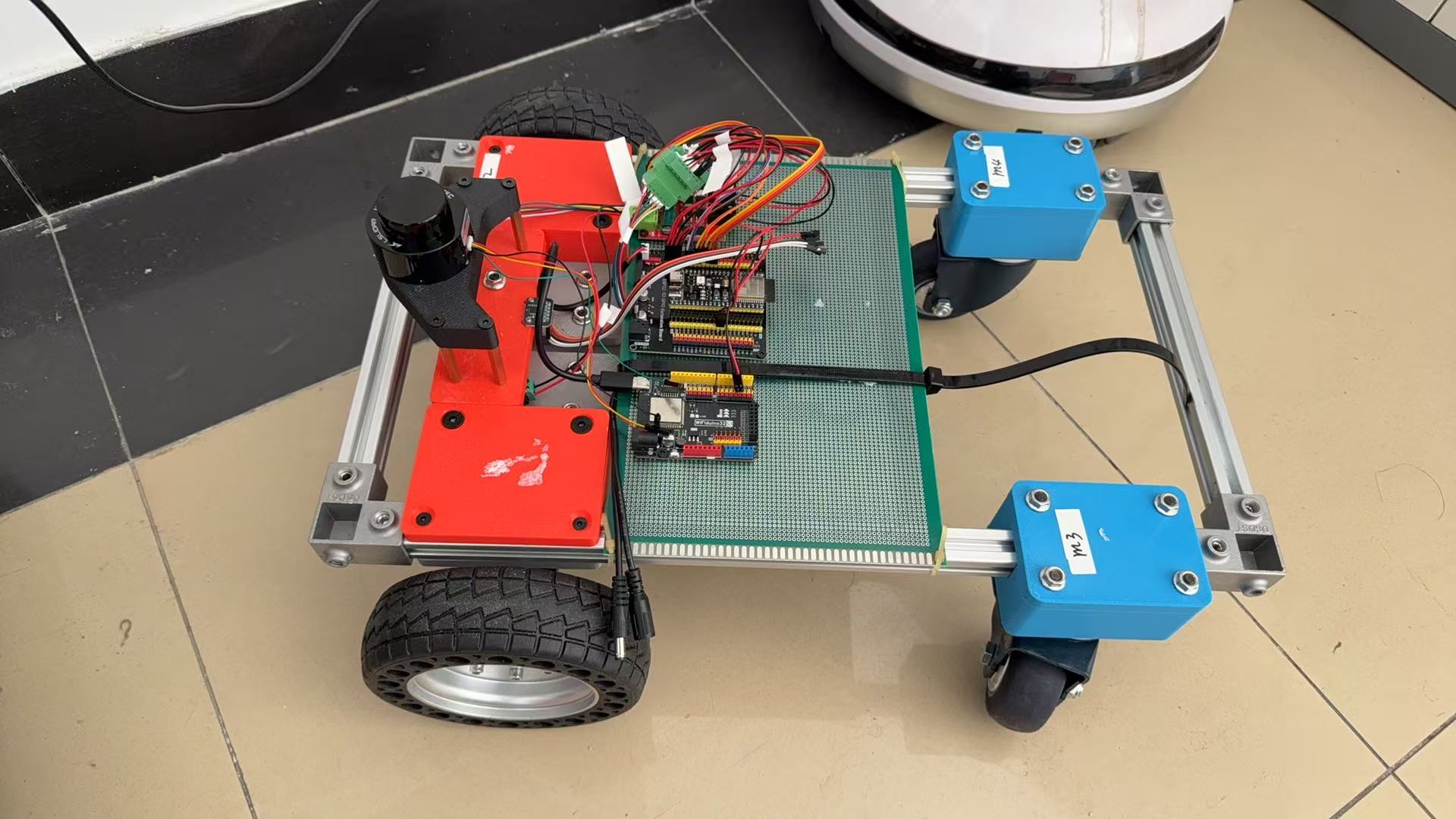
低矮差速底盘集成 N10 激光雷达与控制板,用于 SLAM 和导航调试
02 · 实物形态
Home02:外形、人机交互与底盘验证并行
- 整机形态:立式支架、屏幕/交互面板、电池与底盘组合,验证家庭服务机器人外形。
- 雷达底盘:N10 雷达、驱动轮、万向轮、控制板与型材框架构成低矮导航实验平台。
- 模块化结构:底盘、传感器、控制板、电源和上层交互可分阶段替换和升级。

Home02 整机形态、雷达底盘和底盘俯视结构
03 · 项目目标
面向真实室内环境的可运行原型
- 移动底盘:ESP32-S3 + 驱动板实现差速控制、编码器读取、PID 调速与串口协议。
- 定位建图:N10 雷达、IMU 和轮速里程计完成 2D SLAM 与融合定位。
- 自主导航:集成 Nav2,实现目标点规划、避障、速度平滑和点击导航。
- 远程操作:Web 页面展示地图、雷达、小车状态,并支持遥控和导航。
- 多车部署:主机名与 ROS_DOMAIN_ID 区分多台设备,适合教学分组。
- 智能扩展:预留语音、视觉、VLM、看护和陪伴应用接口。
Pi5上层 ROS2 与 Web
ESP32底层运动控制
Nav2自主导航闭环
从底盘硬件布局到自主导航算法形成完整闭环
05 · 硬件平台
面向室内导航的传感与运动组合
| 模块 | 型号 / 方案 | 作用 |
|---|---|---|
| 主控制器 | Raspberry Pi 5 8GB | Ubuntu 24.04、ROS2 Jazzy、SLAM/Nav2/Web |
| 底层控制 | ESP32-S3 + 奇果派驱动板 | 电机控制、编码器采集、JSON 串口协议 |
| 激光雷达 | 镭神 N10 | 2D 360° 扫描、建图与避障 |
| IMU | 幻尔 IM10A / BNO085 备用 | 姿态、航向、角速度与 EKF 融合 |
| 电机 | 双路直流电机 + 霍尔编码器 | 差速驱动与轮速里程计 |
| 电源 | Waveshare UPS HAT (E) | 电池供电、电压电流监测、低电量保护 |
N10 雷达提供 2D 环境感知,编码器与 IMU 提供运动状态估计
07 · SLAM 与融合定位
雷达建图 + 编码器/IMU 融合
N10 雷达 → /scan → slam_toolbox → /map + TF(map→odom)
ESP32 编码器 → /odom ──┐
├→ EKF → /odom_filtered + TF(odom→base_link)
IM10A IMU → /imu/data ─┘
TF 链:map → odom → base_link → laser- N10 雷达:负责 2D 360° 环境扫描,为 SLAM 与避障提供数据。
- 编码器:提供线速度与里程估计,反映底盘实际运动。
- IMU:提供航向和角速度,改善里程计漂移和转向估计。
- EKF:融合轮速与 IMU,输出稳定的
/odom_filtered。
/scanN10 雷达扫描
/odom编码器里程计
/imu/dataIMU 姿态
SLAM 与 EKF 的稳定性取决于雷达、IMU、编码器和 TF 链的协同
10 · 智能扩展
从移动平台到家庭服务机器人
实时语音接入 PiCarVoice,实现可打断、低延迟、带人设背景的自然语音对话。
视觉看护接入 RGB / 红外 / 深度相机,支持远程查看、人体检测与跌倒检测。
VLM 理解让机器人回答“前面有什么”“桌子旁边有没有人”等开放式视觉问题。
- 语音指令可以进一步联动导航:“去客厅”“到桌子旁边”“回充电点”。
- 家庭看护可叠加日程、健康档案、用药提醒和紧急呼叫。
- 具身智能实验可在真实底盘上验证多模态感知与任务 Agent。
立式支架与屏幕/交互面板为家庭人机交互预留空间
11 · 应用场景
教学、科研与家庭服务共用一个平台
- 家庭陪伴机器人:结合实时语音,为儿童提供问答、讲故事、英语练习和机械电子启蒙。
- 独居老人看护助手:结合摄像头、语音和日程信息,提供巡逻、提醒、远程查看和异常报警。
- 室内导航教学平台:讲解 ROS2、TF、SLAM、Nav2、EKF、传感器融合和路径规划。
- 具身智能实验平台:承载 VLM、Agent、语音控制、视觉导航、强化学习等研究型任务。
- 系统工程案例:展示从供电、串口、驱动、传感器、算法到交互界面的完整实践。
教学ROS2 / SLAM / Nav2
科研VLM / Agent / 具身智能
应用陪伴 / 看护 / 巡逻
同一底盘可服务课程、实验和家庭机器人原型验证