从方案到课程的完整讲解
把智能小车压到“课堂可批量使用”的成本
PiCar Mini 2WD 的目标不是追求复杂传感器堆叠,而是用最少模块讲清楚嵌入式智能车的核心概念:供电、GPIO、PWM、电机驱动、测距、状态机和简单避障。
- 低成本:核心物料 ¥32.98,整车约 ¥35~40,适合批量采购和分组实验。
- 低门槛:采用 MicroPython,学生可从 Python 语法平滑进入嵌入式开发。
- 低复杂度:去掉 OLED 等非必要外设,降低接线、供电和 I2C 冲突风险。
- 可扩展:保留 GPIO3、GPIO4、GPIO7、GPIO8,可扩展 ToF、蜂鸣器、循迹模块等。

主控、电源、电机驱动、超声波与 2WD 机械套件构成最小可用平台
一个主控、一个驱动、一个测距传感器
整车采用 ESP32-C3 SuperMini 作为主控,双 H 桥迷你 L298N 驱动两只 TT 减速电机,HC-SR04 负责前方测距,运行按钮与红绿 LED 提供基础人机交互。
ESP32-C3 SuperMini
├── GPIO9/10/20/21 → 双 H 桥 → 左右 TT 电机
├── GPIO1/2 → HC-SR04 Trig / Echo
├── GPIO0 → 运行按钮
├── GPIO5/6 → 绿 / 红 LED
└── WiFi / BLE → 后续遥控、Web、联网扩展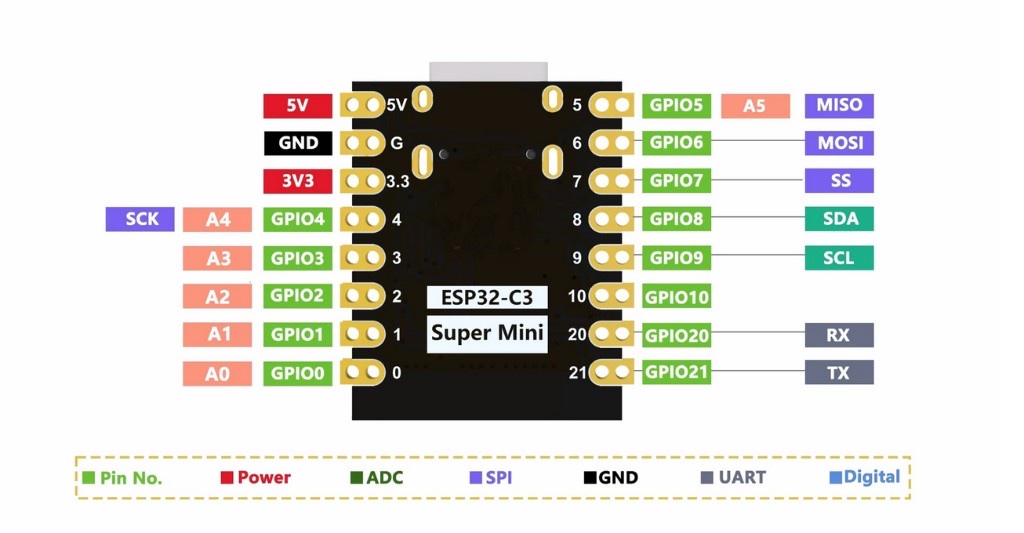

ESP32-C3 SuperMini 与 2WD 底盘套件是本方案的核心
核心 BOM:¥32.98
| 模块 | 型号 / 规格 | 数量 | 小计 |
|---|---|---|---|
| 电池 | 18650 锂离子电池,2200mAh,XH2.54 2P | 1 | ¥6.12 |
| 充放电主板 | 5V 充放电一体小板,Type-C 同口,B+ / B- | 1 | ¥2.65 |
| 主控板 | ESP32-C3 SuperMini,WiFi/BLE | 1 | ¥8.76 |
| 电机驱动 | 2 路直流电机驱动模块,双 H 桥,迷你 L298N | 1 | ¥1.05 |
| 测距传感器 | HC-SR04 超声波模块,新版 3.3V~5V | 1 | ¥4.50 |
| 2WD 套件 | 底盘 + 驱动轮 + TT 电机 ×2 + 万向轮 | 1 | ¥9.90 |
| 核心物料合计 | ¥32.98 | ||
加上杜邦线、双面胶、扎带、3mm LED 与限流电阻等辅材后,整车约 ¥35.48 ~ ¥39.98。
低成本不是牺牲教学价值,而是把每个工程环节暴露出来
逻辑侧 5V,动力侧优先走 B+
电池经 5V 充放电一体小板输出 5V 给 SuperMini,电机驱动 VM 优先接电池 B+,这样大电流路径更短,升压回路压力更小。
18650 电池
├── 5V 充放电板 → 5V → ESP32-C3 SuperMini
│ ├── HC-SR04 / 按钮 / LED 逻辑侧
│ └── GPIO 控制信号
└── B+ / B- ─────────────→ 电机驱动 VM / GND
├── MOTOR-A → 左轮
└── MOTOR-B → 右轮- 共地:SuperMini、电机驱动、超声波、按钮、LED 必须共 GND。
- 效率:TT 马达常用 3~6V,B+ 直供符合电压范围,减少升压损耗。
- 安全:上电前确认 B+ / B-、5V / GND 极性,避免反接。

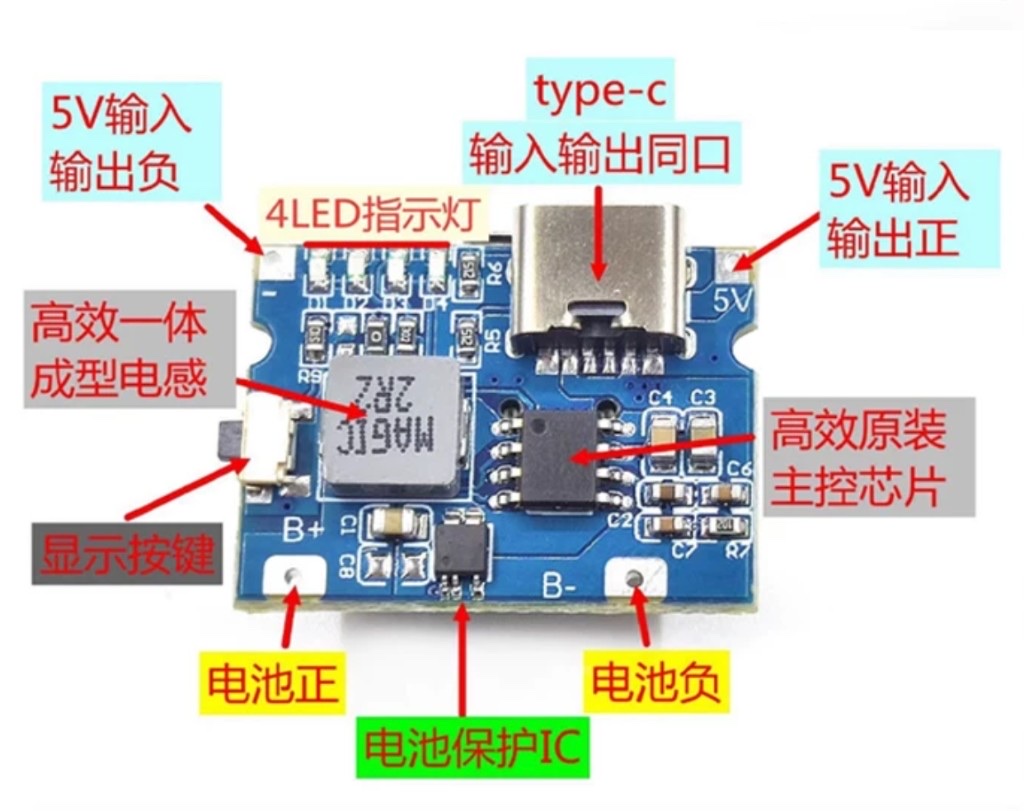
单节 18650 + 5V 充放电模块完成逻辑供电与电池管理
双 H 桥控制两个 TT 减速电机
迷你 L298N 双 H 桥模块使用 A1/A2 控制电机 A,B1/B2 控制电机 B;通过 PWM 占空比控制速度,通过高低电平组合控制正反转、滑行和刹车。
| 控制脚 | 功能 | PiCar Mini 分配 |
|---|---|---|
| A1 / A2 | 电机 A 正反转与 PWM | GPIO9 / GPIO10,左轮 |
| B1 / B2 | 电机 B 正反转与 PWM | GPIO20 / GPIO21,右轮 |
| VM / GND | 电机动力供电 | B+ / 公共 GND 优先 |
| MOTOR-A / B | 电机输出 | 连接左右 TT 马达 |
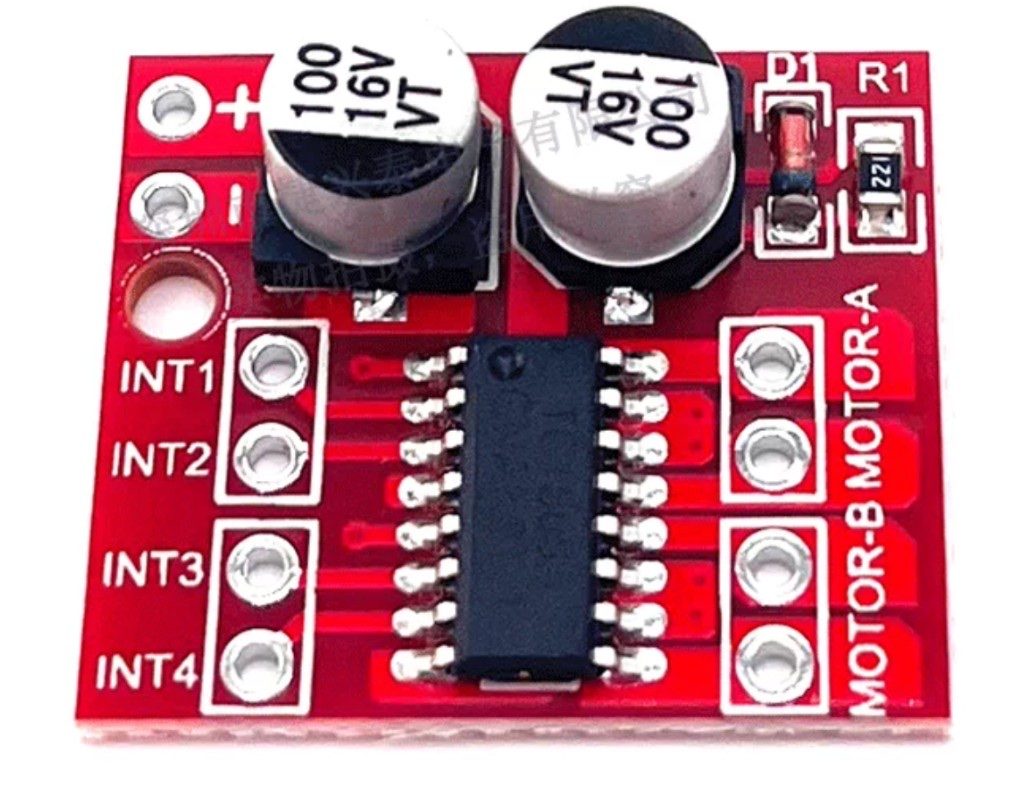

双 H 桥模块让学生直观看到方向控制与 PWM 调速的关系
超声波避障 + 按钮启停 + 红绿状态灯
PiCar Mini 2WD 保留最基础但最有教学价值的人机交互:按键控制运行状态,红绿 LED 显示工作与告警,HC-SR04 通过 Trig / Echo 测量前方距离。
选择 HC-SR04 的主要原因是探测角度宽、价格低、适合基础避障;如果要做更精准的定点测距,可升级为 VL53L0X ToF。



测距、按钮、LED 构成最小的人机交互闭环
9 个 GPIO 已占用,4 个 GPIO 保留扩展
| GPIO | 用途 | 状态 |
|---|---|---|
| GPIO0 | 运行按钮 OUT | 已分配 |
| GPIO1 / GPIO2 | HC-SR04 Trig / Echo | 已分配 |
| GPIO5 / GPIO6 | 绿色 / 红色 LED,经限流电阻接 GND | 已分配 |
| GPIO9 / GPIO10 | 电机 A:A1 / A2,左轮 | 已分配 |
| GPIO20 / GPIO21 | 电机 B:B1 / B2,右轮 | 已分配 |
| GPIO3 / GPIO4 / GPIO7 / GPIO8 | ToF、蜂鸣器、循迹、扩展 I2C 等 | 可用 |
GPIO9 → A1 GPIO10 → A2 左轮
GPIO20 → B1 GPIO21 → B2 右轮
GPIO1 → Trig GPIO2 ← Echo HC-SR04
GPIO0 ← OUT 运行按钮
GPIO5 → R → 绿 LED → GND
GPIO6 → R → 红 LED → GND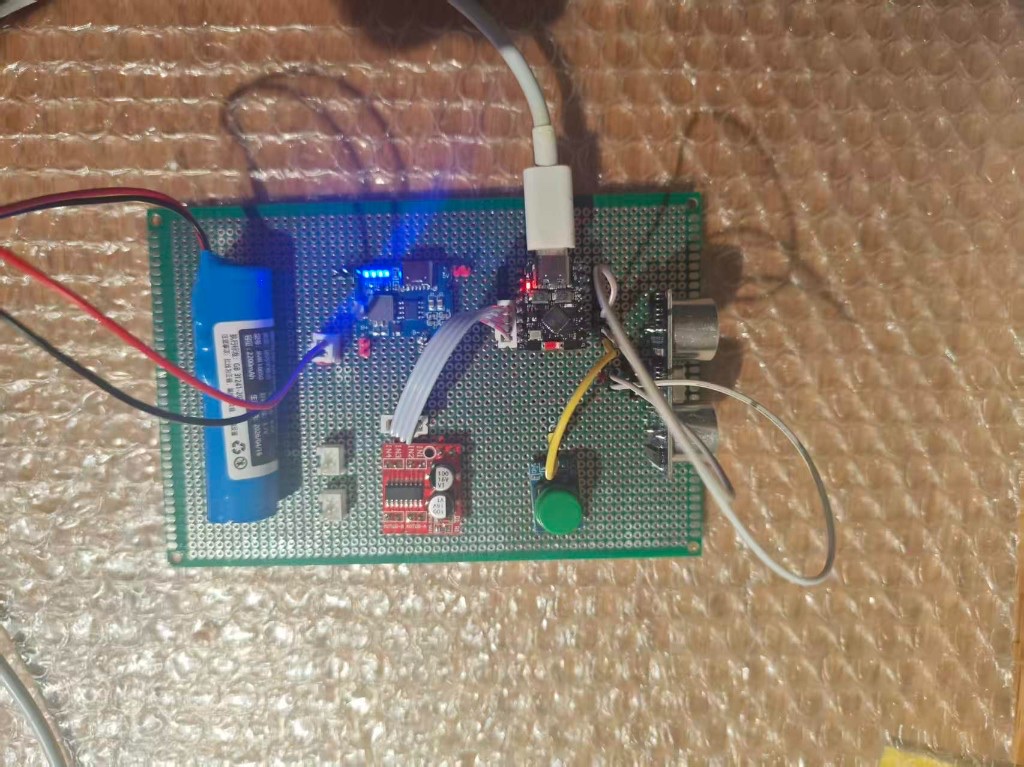
评估板全景:ESP32-C3 SuperMini、双 H 桥、HC-SR04、按钮与电池供电
从入门小车到进阶实验平台
| 升级方向 | 方案 | 意义 |
|---|---|---|
| 测距升级 | VL53L0X ToF,软件 I2C 建议走 GPIO3/GPIO4 | 更精准的定点测距 |
| 电机驱动 | TB6612FNG | 效率更高、发热更小 |
| 声音反馈 | 有源蜂鸣器,如 GPIO7 | 状态提示与人机交互 |
| 循迹 | TCRT5000 ×2 | 黑线循迹与路径任务 |
| 联网控制 | WiFi Web 控制 / BLE 手机遥控 | 引入物联网与前端交互 |
当前选择 HC-SR04 是为了低成本、宽角度和教学友好;进阶时可扩展 ToF 与多传感器融合